Reverse Engineering A Toy Robot¶
@crlane
Tea Time
2017-01-19
Agenda¶
- introduce mebo
- reverse engineering!
- writing a library
- publishing solution
Meet Mebo¶
- toy robot
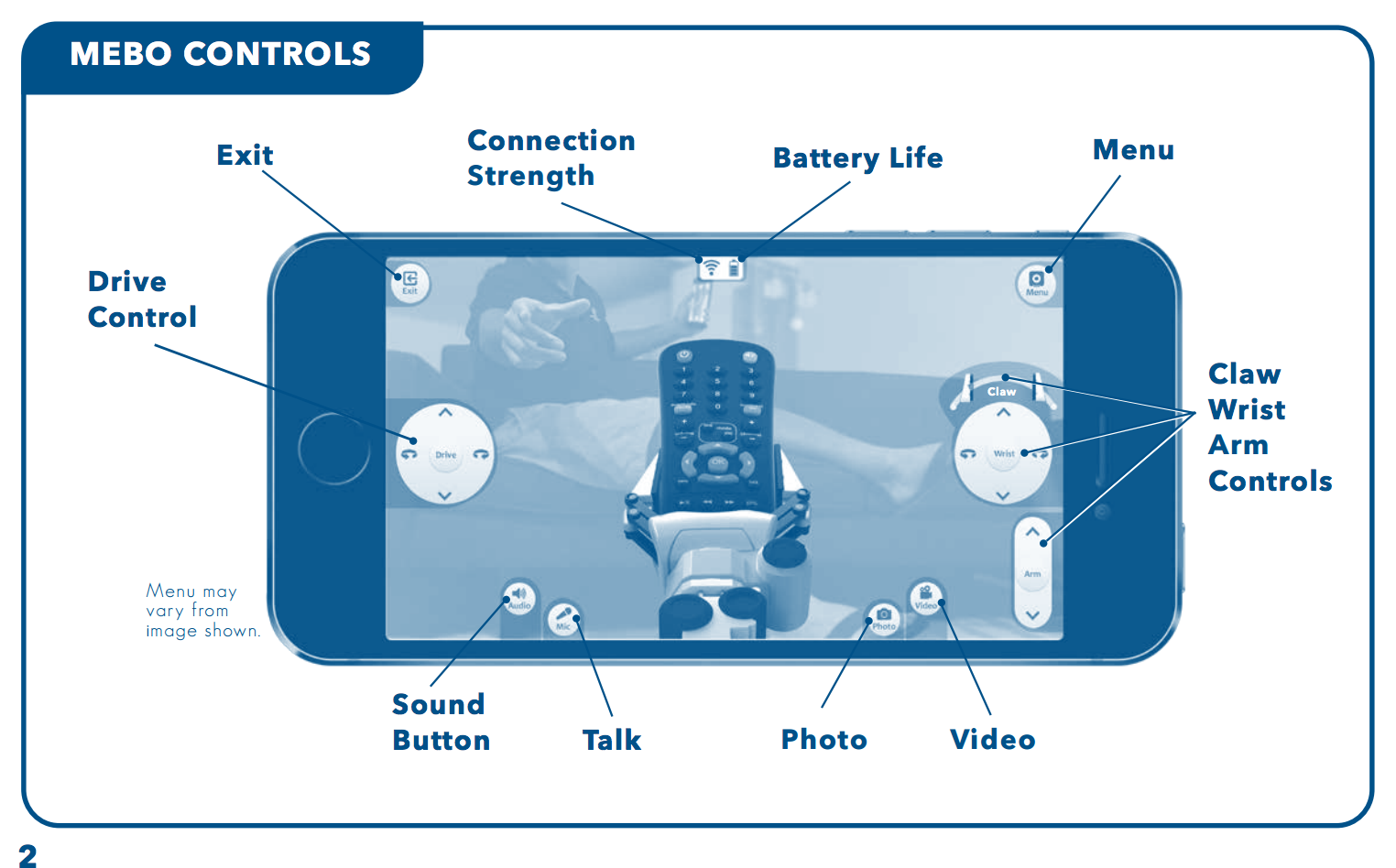
- controlled via an Android/iOS app
- looks kind of like Mars rover
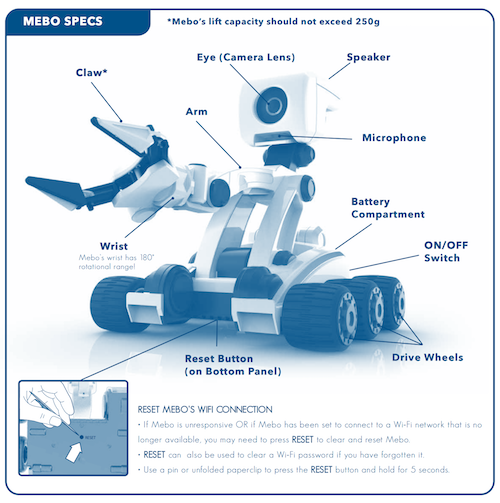
Features¶
- 5-axis arm
- joystick control
- interactive media
{kind=link}
Problem Definition¶
- I want to play with this thing!
- I want my son to think I'm cool
- I want to do nerdy things with my son
- I want to use my computer and (probably) Python
I'll use whatever's on PyPI!¶
No Python Library¶
Sweet, I'll Write It!¶
Undocumented API¶
Can I Figure it Out?¶
Reverse Engineering¶
Step 1: What do I know?¶
- The app talks to the robot via the LAN
- It is possible to spy on traffic in a network
- There are a limited number of functions
- It works on iOS & Android client devices
Step 2: Gathering Data¶
- Problem 1: I don't know the IP address of the robot
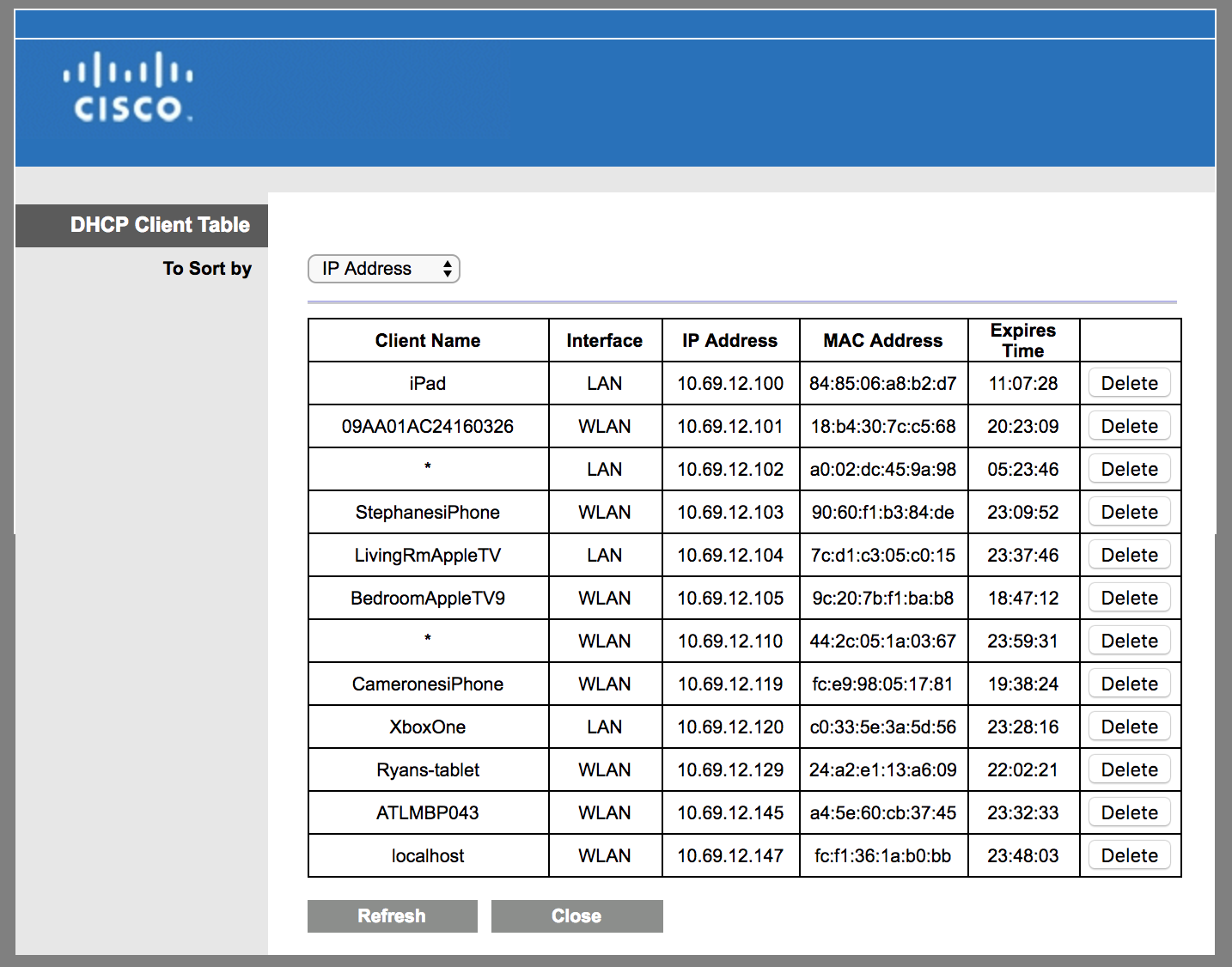
Discovering the Correct IP¶
- Ping the IP for hostnames I don't recognize
- Turn off Mebo
- Does it still ping?
- Problem 2: I don't know how to snoop traffic from iPad -> Mebo
LMGTFY
Snooping Traffic¶
- Plug in iPhone to Mac
- Get the UDID (unique ID for device)
- Add a virtual interface on Mac using the UDID1
- tcpdump from virtual interface
- Wireshark
(side note: go watch Christine Spang on WebSockets from the Wire Up https://www.youtube.com/watch?v=u5QT3luWx7w)
- Problem 3: I don't know what I'm looking for
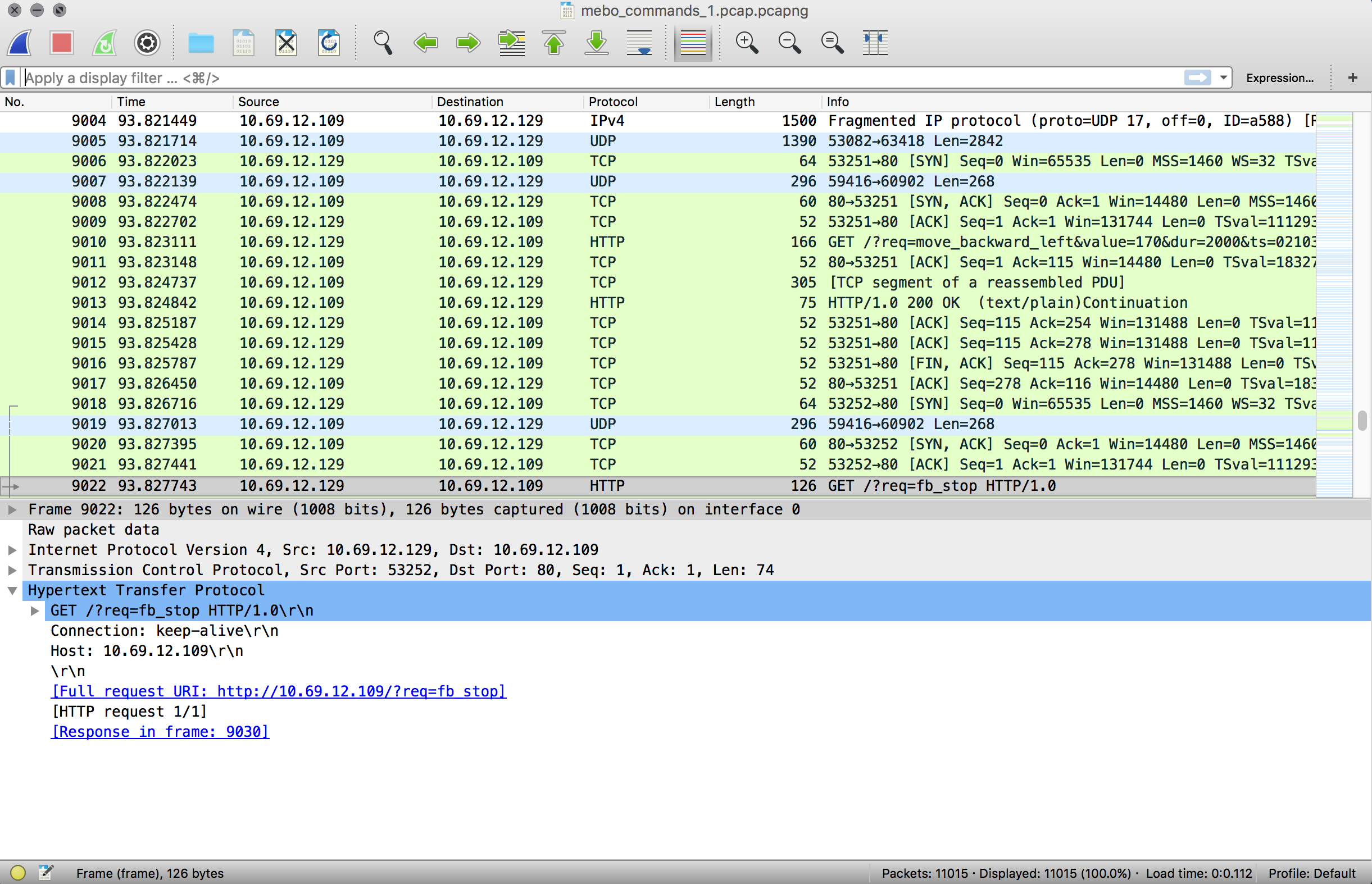
Wireshark¶
- lots of experimentation
- look for familiar things
- use filters
Conclusion¶
Mebo is controlled via normal HTTP GET requests. Query parameters change the type of function and add additional optional parameters (speed, duration, etc.)
Writing the Library¶
- flexible design for rapid prototyping while I'm still discovering functions
- minimal 3rd party dependencies (requests)
- easy to build, test, deploy, publish
Publishing to PyPI¶
- my first PyPI package
- lots of setup.py wrangling
python setup.py sdist bdist_wheeltwine upload
Next Steps¶
- Refine the API and clean up
- Write some real tests
- Media streaming (RTSP + RTP).